
Ten eerste de samenstelling van het systeem
1. Het detectiesysteem voor onafgebroken overbelasting op de snelweg bestaat over het algemeen uit het verzamel- en forensisch systeem voor overbelastingsinformatie aan de voorkant van het vrachtvoertuig en het beheer van overbelastingsinformatie aan de achterkant van het vrachtvoertuig.
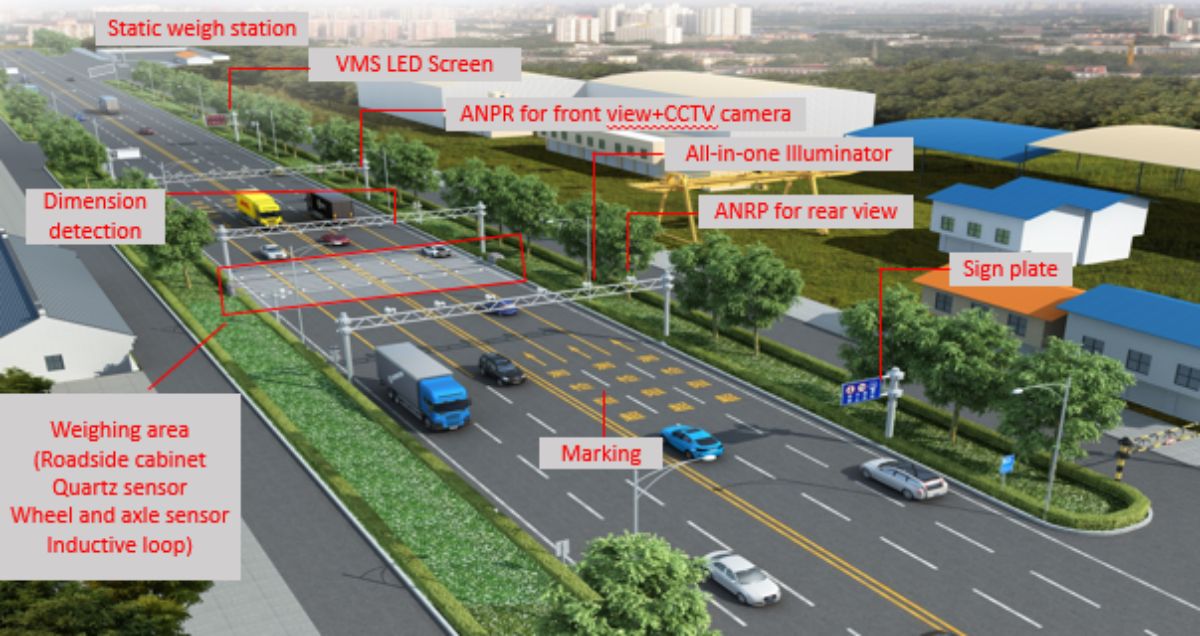
2. Het systeem voor het verzamelen en forensisch analyseren van overbelastingsinformatie aan de voorkant van vrachtwagens bestaat over het algemeen uit continu weegapparatuur, apparatuur voor het detecteren van de voertuigprofielgrootte, apparatuur voor kentekenherkenning en -registratie, voertuigdetector, videobewakingsapparatuur, apparatuur voor het vrijgeven van informatie, verkeersborden, stroomvoorziening en bliksemafleidervoorzieningen, schakelkasten ter plaatse, apparatuur voor het verzamelen en verwerken van informatie en netwerktransmissie, een continu weeg- en detectiegebied, verkeersbordmarkering en gerelateerde ondersteunende faciliteiten.
3. Het back-endplatform voor informatiebeheer over de overbelasting van goederenvoertuigen (inclusief directe handhaving) bestaat over het algemeen uit platforms voor informatiebeheer over de overbelasting op districtsniveau, gemeentelijk niveau en provinciaal niveau (inclusief directe handhaving).
2. Functionele vereisten
1. Functionele vereisten voor continu-weegapparatuur
1.1 Werkingssnelheidsbereik
Het snelheidsbereik van de non-stop weegapparatuur bedraagt (0,5~100) km/u voor vrachtwagens die door het non-stop detectiegebied rijden.
1.2 Nauwkeurigheidsniveau van het totale voertuiggewicht
(1) De maximaal toegestane fout bij het wegen van het totale gewicht van het voertuig en de lading binnen het toegestane werksnelheidsbereik van de onafgebroken weegapparatuur mag niet lager zijn dan de bepalingen en vereisten van de nauwkeurigheidsniveaus 5 en 10 in de JJG 907 "Dynamic Highway Vehicle Automatic Weighing Apparatus Verification Regulations" (Tabel 2-1).
Tabel 2-1 Maximaal toegestane fout bij dynamische weging van het totale voertuiggewicht
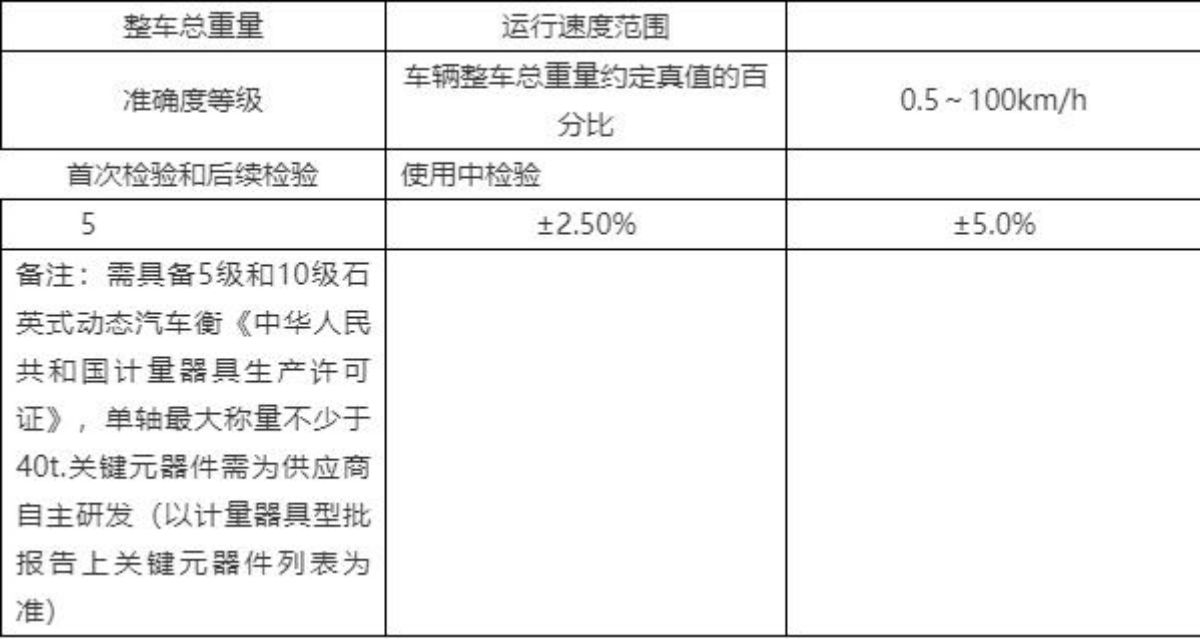
(2) Wanneer het vrachtvoertuig het detectiegebied voor non-stop wegen passeert met afwijkend rijgedrag zoals frequent accelereren en decelereren, springen van de weegschaal, stoppen, een S-bocht maken, oversteken, een druklijn, achteruitrijden of stop-and-go rijden in een korte tijd, mag het nauwkeurigheidsniveau van het totale gewicht van het voertuig van de non-stop weegapparatuur niet lager zijn dan de bepalingen en vereisten van tabel 2-1. (Het persen van rijstroken en het rijden in de tegenovergestelde richting zijn belangrijk).
1.3 De weegcel die wordt gebruikt in de ononderbroken weegapparatuur moet voldoen aan de bepalingen en vereisten van GB/T7551 "Weegcel", de levensduur moet ≥ 50 miljoen assen zijn en het beschermingsniveau van de weegcel die wordt gebruikt bij ononderbroken wegen mag niet lager zijn dan IP68.
1.4 De gemiddelde storingsvrije bedrijfstijd van onafgebroken weegapparatuur mag niet minder dan 4000 uur bedragen. De garantieperiode voor belangrijke componenten mag niet minder dan 2 jaar bedragen en de levensduur mag niet minder dan 5 jaar bedragen.
1.5 Vereisten voor uitschakelbeveiliging
(1) Wanneer de stroom uitvalt, moet de ononderbroken weegapparatuur automatisch de op dat moment ingestelde parameters en weeginformatie kunnen opslaan. De opslagtijd mag niet korter zijn dan 72 uur.
(2) Bij stroomuitval mag de interne kloklooptijd van de onafgebroken weegapparatuur niet korter zijn dan 72 dagen.
1.6 Vereisten voor anticorrosiebehandeling
De blootgestelde metalen onderdelen van continu weegapparatuur moeten worden behandeld met een anticorrosiebehandeling in overeenstemming met de relevante bepalingen van GB/T18226 "Technische voorwaarden voor het anticorrosief maken van stalen componenten in de verkeerstechniek".
1.7 De snelheidsmeetfout van de voertuigdetector van de non-stop weegapparatuur moet ≤± 1 km/u zijn en de nauwkeurigheid van de verkeersstroomdetectie moet ≥99% zijn.
1.8 De technische eisen aan voertuigscheiders voor continu-weegapparatuur zijn als volgt:
(1) De detectienauwkeurigheid van het aantal assen moet ≥98% zijn.
(2) De detectiefout van de asafstand moet ≤± 10 cm zijn.
(3) De nauwkeurigheid van de voertuigclassificatie moet ≥ 95% zijn.
(4) Het herkenningspercentage over meerdere kanalen moet ≥98% zijn.
1.9 Het toepasselijke bereik van de werkomgevingtemperatuur moet liggen tussen -20°C~+80°C en de technische indicatoren voor de weerstand tegen omgevingsvochtigheid moeten voldoen aan de relevante voorschriften en vereisten voor mechanische en elektrische apparatuur voor buitengebruik van JT/T817 "Algemene technische vereisten en testmethoden voor elektromechanische systeemapparatuur voor snelwegen".
1.10 Er dienen maatregelen te worden genomen om de ruimte regen- en stofdicht te maken. Het beschermingsniveau dient te voldoen aan de bepalingen en vereisten van JT/T817.

2. Functionele vereisten voor apparatuur voor het testen van de voertuigprofielgrootte
2.1 Wanneer het vrachtvoertuig het non-stop weegdetectiegebied passeert met een snelheid van (0,5~100) km/u, moet het automatisch de realtime snelle detectie van de geometrische afmetingen en het 3D-model van de lengte, breedte en hoogte van het vrachtvoertuig kunnen voltooien en de juiste identificatieresultaten kunnen genereren. De responstijd mag niet korter zijn dan 30 ms en de tijd die nodig is om een enkele detectie en uitvoerresultaat te voltooien, mag niet langer zijn dan 5 s.
2.2 Het geometrische meetbereik van de lengte, breedte en hoogte van het vrachtvoertuig moet voldoen aan de eisen in Tabel 2-2.
Tabel 2-2 Meetbereik van de apparatuur voor het testen van de voertuigprofielgrootte
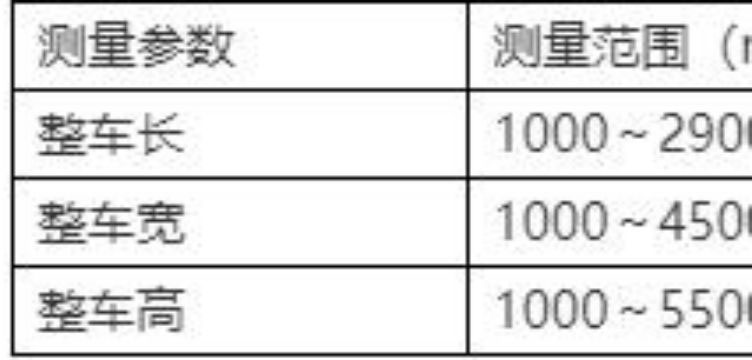
2.3 De meetresolutie van de geometrische afmetingen van de lengte, breedte en hoogte van het vrachtvoertuig bedraagt niet meer dan 1 mm. De meetfout van de apparatuur voor het detecteren van de omtrek van het voertuig moet voldoen aan de volgende vereisten binnen het bereik van 1~100 km/normale bedrijfssnelheid: (wat betreft de rijsnelheid moet deze overeenkomen met de vereisten van de vorige dynamische weegapparatuur).
(1) Lengtefout ≤ ± 500 mm;
(2) Breedtefout ≤ ± 100 mm;
(3) De hoogtefout ≤± 50 mm.
2.4 De frequentie van laserpuntdetectie van de apparatuur voor het testen van de voertuigprofielgrootte moet ≥1 kHz zijn en moet beschikken over 9 typen voertuigmodellen en functies voor het detecteren van de voertuigsnelheid zoals gespecificeerd in GB1589 voor motorvoertuigen "Omtrekafmetingen, aslast en kwaliteitslimieten van auto's, aanhangwagens en automobieltreinen".
2.5 Het moet de functies hebben van parallelle vrachtvoertuigen, beoordeling van de S-bocht, afscherming van zwart materiaal en detectie van de geometrische grootte van het profiel van vrachtvoertuigen met hoog reflecterend materiaal.
2.6 moet de classificatie van vrachtvoertuigmodellen bevatten, inclusief verkeersvolume, locatiesnelheid, frontale tijdsafstand, het volgen van het wagenpercentage, frontale afstand en functies voor tijdsbezettingsdetectie. De classificatienauwkeurigheid van vrachtvoertuigmodellen moet ≥ 95% zijn.
2.7 Het toepasselijke bereik van de werkomgevingtemperatuur moet liggen tussen -20 °C en +55 °C. De technische indicatoren voor de weerstand tegen omgevingsvochtigheid moeten voldoen aan de relevante voorschriften en vereisten voor mechanische en elektrische apparatuur voor buitengebruik van JT/T817 "Algemene technische vereisten en testmethoden voor elektromechanische systeemapparatuur voor snelwegen".
2.8 Laservoertuigprofielmaattestapparatuur moet worden geïnstalleerd met een portaal met een onderhoudskanaal
2.9 Het beschermingsniveau van de apparatuur voor het testen van de voertuigprofielgrootte mag niet lager zijn dan IP67.
3. Functionele eisen voor kentekenherkennings- en registratieapparatuur
3.1 De functionele eisen van kentekenplaatherkennings- en registratieapparatuur moeten voldoen aan de relevante bepalingen en eisen van GB/T 28649 "Automatisch identificatiesysteem voor kentekenplaten van motorvoertuigen".
3.2 De kentekenherkennings- en registratieapparatuur moet zijn uitgerust met een invullicht of knipperlicht, waarmee het voertuignummer dat door het detectiegebied voor onafgebroken wegen rijdt, onder alle weersomstandigheden duidelijk kan worden geregistreerd en het juiste identificatieresultaat kan worden gegenereerd.
3.3 De kentekenplaatherkennings- en registratieapparatuur moet overdag een nauwkeurigheid van ≥ 99% van de kentekenplaatherkenning hebben, en 's nachts een nauwkeurigheid van ≥ 95% van de kentekenplaatherkenning. De herkenningstijd mag niet meer dan 300 ms bedragen.
3.4 De afbeelding van het verzamelde kenteken van een vrachtwagen moet duidelijk worden weergegeven in JPG-formaat over de volledige breedte. Het herkenningsresultaat moet de volgende gegevens bevatten: het tijdstip van herkenning, de kleur van het kenteken, etc.
3.5 Pixels van het kentekenherkenningsbeeld mogen niet minder dan 5 miljoen zijn, pixels van andere vastlegbeelden mogen niet minder dan 3 miljoen zijn, vrachtwagens die door het detectiegebied voor onafgebroken wegen rijden, moeten in totaal niet minder dan 4 beelden met een hoge resolutie vastleggen van de voorkant van het voertuig, twee zijkanten van het voertuig en de achterkant van het voertuig.
3.6 Op basis van de informatie op de voorste HD-afbeelding, het kentekengebied van het vrachtvoertuig, de kenmerken van de voor- en cabine, de voorkleur, enz., moeten het aantal assen, de carrosseriekleur en de basissituatie van de vervoerde goederen duidelijk te onderscheiden zijn op basis van de informatie op de HD-afbeelding aan de zijkant van het voertuig; op basis van de informatie op de HD-afbeelding van de achterkant van het voertuig kunnen het kentekennummer van de achterkant, de carrosseriekleur en andere informatie worden onderscheiden.
3.7 Op elke afbeelding moet informatie worden geplaatst zoals de detectiedatum, de testtijd, de testlocatie, het totale gewicht van het voertuig en de lading, de afmetingen van het voertuig, het nummer van de apparatuur voor beeldforensisch onderzoek, informatie over namaakbestrijding en andere informatie.
3.8 De bandbreedte van het transmissiekanaal voor vastgelegde beeldinformatie mag niet minder dan 10 Mbps bedragen.
3.9 Het apparaat moet zelfcontrolefuncties hebben voor bijvoorbeeld abnormale communicatie en stroomuitval.
3.10 Het toepasselijke bereik van de werkomgevingtemperatuur moet liggen tussen -20 °C en +55 °C. De technische indicatoren voor de weerstand tegen omgevingsvochtigheid moeten voldoen aan de relevante voorschriften en vereisten voor mechanische en elektrische apparatuur voor buitengebruik van JT/T817 "Algemene technische vereisten en testmethoden voor elektromechanische systeemapparatuur voor snelwegen".
3.11 Het beschermingsniveau van kentekenherkennings- en registratieapparatuur mag niet lager zijn dan IP67.
4 Functionele vereisten voor videobewakingsapparatuur
4.1 Videobewakingscamera moet een infrarood dag- en nachtcamerafunctie hebben en moet in staat zijn om ononderbroken het detectiegebied van de allround camerafunctie te wegen en ten minste 10 seconden aan bewijsmateriaal van overbelasting van illegale vrachtwagens op te slaan.
4.2 Het moet de volgende functies hebben: zelfdiagnose, kalibratie van het gezichtsveld en automatische compensatie.
4.3 Forensische videobeelden moeten minimaal 3 miljoen pixels groot zijn en helder en stabiel zijn.
4.4 Het moet de functie hebben van roteren en zoomen, en de horizontale en verticale rotatie en lenszoom kunnen worden uitgevoerd volgens de besturingsopdracht.
4.5 De functie van het apparaat moet het reinigen en verwijderen van regen- en vorstvlekken van mistlampen zijn. Ook moet het apparaat de beschermkap op tijd kunnen reinigen, verwarmen en ontdooien.
4.6 Forensische videobeelden moeten in realtime worden verzonden naar het overload-informatiebeheer- en directe handhavingsplatform op provinciaal (stedelijk) niveau.
4.7 Videobewakingsapparatuur en andere technische indicatoren van de bijbehorende accessoires moeten voldoen aan de relevante bepalingen en vereisten van GA/T995.
4.8 Het toepasselijke bereik van de werkomgevingtemperatuur moet liggen tussen -20°C~+55°C en de technische indicatoren voor de weerstand tegen omgevingsvochtigheid moeten voldoen aan de relevante voorschriften en vereisten voor mechanische en elektrische apparatuur voor buitengebruik van JT/T817 "Algemene technische vereisten en testmethoden voor elektromechanische systeemapparatuur voor snelwegen".
5 Functionele vereisten voor apparatuur voor informatiepublicatie
5.1 Het moet real-time informatie over de overbelading van het voertuig kunnen vrijgeven aan de bestuurder van het illegaal geladen voertuig.
5.2 Het moet informatie kunnen publiceren en weergeven, zoals tekstwisseling en scrollen.
5.3 De belangrijkste functionele indicatoren en technische indicatoren van LED-variabele informatieborden op snelwegen moeten voldoen aan de relevante bepalingen en vereisten van GB/T23828 "LED-variabele informatieborden op snelwegen".
5.4 Dubbelkoloms portaalscherm voor snelwegen met LED-display voor variabele informatieborden. De meest gebruikte pixelafstand is 10 mm, 16 mm en 25 mm. De weergaveoppervlakte van vier en zes rijstroken kan respectievelijk 10 en 14 vierkante meter bedragen. De weergave-inhoud kan 1 rij en 14 kolommen bevatten.
5.5 De pixelafstand van het enkelkoloms LED-display met variabele informatieborden voor snelwegen kan worden geselecteerd: 10 mm, 16 mm en 25 mm. De schermgrootte kan worden geselecteerd van 6 vierkante meter tot 11 vierkante meter. Het formaat van de display-inhoud kan 4 rijen en 9 kolommen zijn.
5.6 Bij het ontwerp en de plaatsing van LED-informatieborden op snelwegen en de visuele herkenningsafstand moet volledig rekening worden gehouden met de werkelijke snelheid en de visuele herkenningsbehoeften van vrachtvoertuigen op het weggedeelte. Ook moeten deze borden voldoen aan de relevante bepalingen en vereisten van GB/T23828 "LED-informatieborden op snelwegen".
6 Vereisten voor het instellen van verkeersborden
6.1 Plaats een verkeersbord voor de toegang tot het "non-stop weeg- en detectiegebied" op een afstand van minimaal 200 meter vóór het non-stop weegdetectiegebied.
6.2 Plaats een verkeersbord "geen rijstrookwisseling" op minimaal 150 meter vóór het detectiegebied voor continu wegen.
6.3 Plaats een verkeersbord met de tekst "Verbod op rijstrookwisseling opheffen" op een afstand van minimaal 200 meter achter het detectiegebied voor continue weging.
6.4 De plaatsing van verkeersborden in het detectiegebied voor onafgebroken wegen moet voldoen aan het ontwerp en de eisen van GB5768 "Verkeersborden en markeringen".
7. Vereisten voor stroomvoorziening en bliksembeveiligingsaarding
7.1 Het systeem voor het verzamelen van overbelastingsinformatie en forensisch onderzoek moet zijn uitgerust met stabiele en betrouwbare stroomtoevoerlijnen, die aan de vereisten voor een ononderbroken stroomvoorziening van 24 uur kunnen voldoen.
7.2 Er moeten noodzakelijke maatregelen worden genomen ter bescherming tegen blikseminslag en overspanning voor de voedingsinterface en de besturingsinterface van het systeem voor het verzamelen van overbelastingsinformatie en forensisch onderzoek en de bijbehorende componenten. De beschermingsmaatregelen moeten voldoen aan de relevante bepalingen en vereisten van JT/T817 "Algemene technische vereisten en testmethoden voor apparatuur van elektromechanische snelwegsystemen".
7.3 Het systeem voor het verzamelen van overbelastingsinformatie en het forensisch onderzoek moet een aardingsmethode met één punt in de buurt gebruiken en de DC-parallelle aardingsmethode moet worden toegepast.
7.4 De bliksembeveiliging en de elektrische weerstand van de overbelastingsinformatieverzamelende en forensische apparatuur moeten ≤ 10 Ω zijn en de beschermende aardingsweerstand moet ≤ 4 Ω zijn.
8 Functionele eisen aan de veldschakelkast

8.1 De on-site schakelkast, geconfigureerd met het systeem voor het verzamelen en forensisch analyseren van overbelastingsinformatie, moet data-acquisitieprocessors, voertuigdetectoren, netwerkswitches en andere apparatuur kunnen opslaan. De schakelkast moet de informatie over de overbelasting van vrachtwagens kunnen uploaden naar het Traffic Comprehensive Administrative Direct Enforcement Platform van het Provincial Department of Transportation Information Center en de informatie over de overbelasting van vrachtwagens in realtime kunnen verzenden naar het LED-informatiebord op de snelweg voor vrijgave en weergave.
8.2 De schakelkast moet worden uitgevoerd met een dubbellaagse chassisafdichting, die stof en regen effectief beschermt en een onafhankelijk temperatuurregelsysteem heeft.
8.3 De schakelkast moet worden uitgevoerd met sleuven om functionele uitbreidingen mogelijk te maken.
8.4 De schakelkast moet worden uitgerust met apparatuur voor gegevensbeveiliging om het lekken van detectiegegevens bij overschrijding van de grenswaarde te voorkomen.
9. Vereisten voor het opzetten van onafgebroken weegzones voor overbelasting op de snelweg
9.1 Het detectiegebied voor het ononderbroken wegen bestaat uit de drager van het ononderbroken wegend materieel (kwartskristalsensor) en de geleidingsdelen aan de voor- en achterkant (op basis van het verharde wegdek van 30 meter ervoor en 15 meter erachter) (Figuur 2-1).

Figuur 2-1 Schematisch diagram van het non-stop weeggebied
9.2 De locatie van het continue weeg- en testgebied mag niet vlak zijn, de straal van de longitudinale bocht mag niet te klein zijn, de zichtafstand mag niet te groot zijn en de lange afdalingen en andere weggedeelten moeten, evenals de lineaire indicatoren, voldoen aan de ASTM E1318 "Standaardspecificatie voor snelwegweegsystemen (WIM) met gebruikersvereisten en testmethoden". De specifieke vereisten zijn als volgt:
(1) De draaicirkel van de wegmiddenlijn van het 60 m lange geleidegedeelte en het achterste 30 m lange geleideweggedeelte in het detectiegebied voor non-stop wegen moet ≥ 1,7 km zijn.
(2) De lengtehelling van het wegdek in het voorste 60 m lange geleidegedeelte en het achterste 30 m lange geleideweggedeelte in het detectiegebied voor non-stop wegen moet ≤ 2% zijn.
(3) De hellingswaarde i van het wegdek van het voorste 60 m lange geleideweggedeelte en het achterste 30 m lange geleideweggedeelte van het detectiegebied voor non-stop wegen moet voldoen aan 1% ≤ i ≤ 2%.
(4) Er mogen zich binnen het 150 m lange geleideweggedeelte vóór het detectiegebied voor het non-stop wegen geen obstakels bevinden die het zicht van de bestuurder blokkeren.
(5) De afstand tussen de locatie van het onafgebroken weeg- en detectiegebied en de ingang en uitgang van de snelwegtunnel op hetzelfde weggedeelte mag niet minder dan 2 km en niet minder dan 1 km bedragen.
(6) De horizontale fout van de verbinding tussen de sensor en het wegdek is niet groter dan 0,1 mm
9.3 Om de nauwkeurigheid van de gegevens van de continue weging en de verkeersveiligheid te garanderen, moeten de rijstrookisolatie van het voorste 60 m lange geleideweggedeelte en het achterste 30 m lange geleideweggedeelte van het detectiegebied voor continue weging worden geïsoleerd met een ononderbroken lijn.
9.4 Continue weeg- en testzone ter begeleiding van de aanleg van weggedeelten
(1) De bedding van het geleideweggedeelte moet stabiel zijn en de wrijvingscoëfficiënt van het wegdek moet voldoen aan de ontwerpeisen van het weggedeelte.
(2) Het wegdek van het geleideweggedeelte moet glad en verdicht zijn, en het asfalt mag geen sporen, kuilen, verzakkingen, opstoppingen, scheuren, netwerkscheuren en uitstulpingen vertonen. Het cementverharding mag geen verspringende, gebroken platen, verzakkingen, modderophopingen of andere aandoeningen vertonen. De vlakheid van cementbetonverhardingen en asfaltbetonverhardingen moet voldoen aan de relevante bepalingen en eisen van JTGF80-1 "Standaarden voor kwaliteitsinspectie en -evaluatie van wegconstructies".
(3) De breedte van het wegdek van het geleideweggedeelte moet de normale doorgang van het breedste vrachtvoertuig binnen het weegbereik kunnen ondersteunen.
(4) De middenlijn van het wegdek in het gebied waar onafgebroken gewogen en getest wordt, moet worden geïsoleerd door dubbele gele (enkele gele) doorgetrokken lijnen, en de rijstrookafbakening moet worden geïsoleerd door witte doorgetrokken lijnen.
3. Vereisten voor interfaceprotocol en gegevensformaat
Het interfaceprotocol en het gegevensformaat van het detectiesysteem voor continue snelwegoverbelasting moeten voldoen aan de relevante bepalingen en vereisten van het "Fujian Traffic Comprehensive Administrative Direct Enforcement Engineering Design Plan" om onderlinge verbinding en informatie-uitwisseling tussen de platforms voor informatiebeheer over overbelasting op provinciaal (district), gemeentelijk en provinciaal niveau (inclusief directe handhaving) te garanderen.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Kantoor Chengdu: nr. 2004, Unit 1, Gebouw 2, nr. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Kantoor in Hong Kong: 8F, Cheung Wang-gebouw, 251 San Wui Street, Hong Kong
Fabriek: Gebouw 36, Industriegebied Jinjialin, Stad Mianyang, Provincie Sichuan
Plaatsingstijd: 25-01-2024




